Механическая рука с мешком вместо пальцев
Американские исследователи создали оригинальный манипулятор в виде руки, способный брать и поднимать мельчайшие предметы разной формы. Причем вместо пальцев у него — мешочек с насыпанным в него молотым кофе. Благодаря такой конструкции данная рука может захватывать хрупкий груз, не причиняя ему при этом никакого вреда.

Фото: Фото: AP
Одна из ключевых задач современной роботехники — создание эффективных роботизированных рук-манипуляторов, способных брать предметы и манипулировать ими. При этом идеальная рука-робот должна быть:
1) универсальной — то есть способной ухватить любой предмет, от иголки до слона;
2) "интеллектуальной" — должна уметь распознавать то, что она берет;
3) безопасной для мелких и хрупких предметов;
4) надежной и простой в использовании.
Современные роботизированные руки-манипуляторы решают эти задачи далеко не полностью, и, откровенно говоря, частенько деформируют поднимаемый груз. Ведь большинство таких "конечностей" состоят из стержня, на который крепятся два или несколько пальцев, которые поднимают предмет, ухватывая его за выступы, или сдавливая с боков.
Читайте также: У робота-хирурга рука не дрогнет…
Для того чтобы уменьшить вред, наносимый грузу при подобном обращении с ним, требуется, во-первых, создавать пальцы с несколькими независимыми суставами (то есть использовать достаточно точную электромеханику), во-вторых — организовать обратную связь (как визуальную, так с помощью датчиков давления на "кончиках пальцев"), и, в-третьих — для управления рукой требуется доступ к достаточно мощным вычислительным ресурсам для обработки всей поступающей информации, расчета механики процесса и формирования команд для каждого отдельного сустава на каждом пальце.
Конечно, технически эти условия не являются невыполнимыми, однако исключительная сложность реализации данной схемы выглядит совершенно несоразмерной исходной задаче — просто взять предмет. Кроме того, подобная схема не решает второй пункт из списка: ведь перед тем, как "взять" неизвестный ему предмет, роботу потребуется вначале его ощупать, то есть хоть немножко, но деформировать.
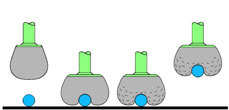
Фото: AP
Что бы решить все эти проблемы, американские ученые предложили уникальную разработку манипулятора, у которого на "хватательном" конце вместо пальцев имеется мешочек с молотым кофе. Разработчики утверждают, что в принципе на месте кофейного порошка может быть любое сыпучее тело, просто они выбрали кофе из-за того, что он всегда у них под рукой. Эффективность действия данного манипулятора вовсе не зависят от конкретного содержимого ладони-мешочка, поскольку сам принцип работы основан на уникальных особенностях поведения сыпучих веществ: в зависимости от условий, они могут течь, словно жидкости, а могут и держать давление, как твердые тела.
К герметично закрытому мешочку из латекса, представляющем собой саму "хваталку" подведена трубочка от насоса, который при необходимости откачивает воздух из свободного пространства между частичками кофе. В нормальном состоянии кофейный порошок очень податлив (если не верите — попробуйте потискать в руках мягкий пакетик с ним), поэтому мешочек легко деформируется при малейшем внешнем воздействии. Если манипулятор опустит такой мешочек сверху на предмет, лежащий, например, на столе, то он просто будет обволакивать все выступы предмета, принимая его форму, но при этом, не ломая и не калеча данный груз.
После того, как объект оказывается захвачен, включается насос, который откачивает воздух из мешочка с кофе. В результате содержимое быстро твердеет, поскольку внешнее атмосферное давление сжимает частички кофе, и они уже не могут свободно перемешаться друг относительно друга.
Самым важным здесь является то, что при быстром затвердении содержимого сам мешочек практически не изменяет свою форму. При этом груз оказывается внутри своеобразных облегающих его "тисков", которые прочно удерживают предмет, но не сдавливают его. Затем руке дается электронная команда: "Поднять груз", и удерживаемый предмет переносится манипулятором в указанное место.
Серия проведенных экспериментов показала, что рука с мешком на конце, радиус которого составляет всего 4 см, способна удерживать груз весом в 5-7 кг. В статье, опубликованной в журнале "PNAS", авторы работы привели список объектов, которые они успешно поднимали с помощью этого устройства. Среди них были маленькие лампочки накаливания, конфеты M&M's, светодиоды, крышки от бутылок, батарейки, разнообразные канцелярские принадлежности и т. п. Впрочем, позже они признались, что плоские диски и мягкие ватные шарики манипулятор ухватить так и не смог.
Создатели чудо-руки не ограничились одной лишь демонстрацией работающего манипулятора, но также исследовали его механические свойства, что бы выяснить, почему мешочек с кофе способен крепко держать захваченный предмет. Выяснилось, что данный процесс осуществляется за счет совместного действия трех разных сил.

Фото: AP
В первую очередь, удержание осуществляет механическая поддержка, возникающая за счет того, что мешочек приобрел жесткость. Ей помогает сила трения, возникающая при контакте груза с латексной поверхностью. И наконец, дополнительный захват обеспечивает "эффект присоски", возникающий из-за того, что, когда участок поверхности мешочка между несколькими частичками вещества втягивается внутрь (потому что воздух откачали и частички уплотнились), он тянет за собой и предмет.
Сильные стороны нового манипулятора сразу бросаются в глаза. Он универсален (правда, в разумных пределах) и может поднимать предметы даже самой замысловатой формы, например, комнатную телевизионную антенну. Также он не нуждается в предварительном "изучении" переносимого предмета, поскольку сыпучий материал в податливом состоянии всегда автоматически принимает требуемую форму.
Наконец, данная рука практически полностью безопасна для хрупких и ломких переносимых предметов. В ряде экспериментов он даже поднимал предметы, буквально разваливающиеся на части.
Читайте также: Автомобиль, которым управляет мысль
Ну и конечно, главное достоинство "кофейной руки" — исключительная простота в использовании. Манипулятор не требует ни сложной и точной электромеханики, ни высококачественных материалов, ни множества датчиков-сенсоров, ни вычислительных мощностей для расчетов. В случае повреждения аппарата, его "хваталку" можно будет починить за несколько минут прямо на месте работы.
Все это наводит ученых на мысль, что со временем данный манипулятор можно будет использовать в качестве протеза для инвалидов, потерявших часть руки. Правда, для этого его придется несколько усовершенствовать, например, уменьшить вес конструкции и оснастить более компактным насосом. Исследователи считают, что протез данной конструкции будет пользоваться популярностью среди людей с ограниченными возможностями.
Популярное
Артистка будет одним из членов жюри шоу "Суперстар ВИА".



Последние материалы
"Правда.Ру" Эл № ФС77-72263 от 01.02.2018 года, выдано Роскомнадзором. Учредитель: Горшенин Вадим Валерьевич. Главный редактор: Новикова Инна Семеновна.
Контакты: +7 (499) 641-41-69, 105066, а/я №26 (для официальных обращений), [email protected] Москва, ул. Старая Басманная, д.16/1Б, «Правда.Ру».
Copyright © 1999-2024, технология и дизайн принадлежат ООО «Техномедиа».
Материалы сайта предназначены для лиц старше 18 лет (18+).
*Meta Platforms признана экстремистской организацией и запрещена, как и принадлежащие ей Facebook и Instagram.